Les grandes agglomérations urbaines sont aujourd'hui confrontées à des problèmes majeurs tels que les restrictions économiques, les défis environnementaux et les approches globales et systémiques de la gestion urbaine [8]. L'un d'entre eux consiste à surveiller précisément les objets urbains qui peuvent être naturels (arbres), artificiels (feux de signalisation ou poteaux), statiques ou en mouvement (voitures). Ceci est essentiel pour analyser leur interaction mutuelle (par exemple, les branches d'un arbre qui sont proches d'un poteau électrique) et pour prévenir les risques qui leur sont associés (par exemple, les parties mortes d'un arbre qui peuvent tomber sur une rue). Il est donc essentiel de pouvoir localiser les objets urbains et de fournir des informations sur leur état.


Il y a trop d'objets pour les approches manuelles ex Montpellier (France) :
- 282 000 habitants (2015)
- >1000 km de routes
- 2450 rues-> 5 à 8 000 panneaux
- ~240 km de câbles (60 km de tramway)
- ~ 40 000 arbres
Acquisition dynamique LiDAR montée sur des dispositifs terrestres
Les capteurs LiDAR, qui sont maintenant généralement montés sur des dispositifs mobiles tels que les voitures, peuvent être utilisés pour effectuer une acquisition dynamique d'une scène entière telle qu'une ville ou une agglomération [4]. Une telle acquisition donne plus de contexte spatial 3D et de précision sur la profondeur qu'une acquisition par caméra vidéo.
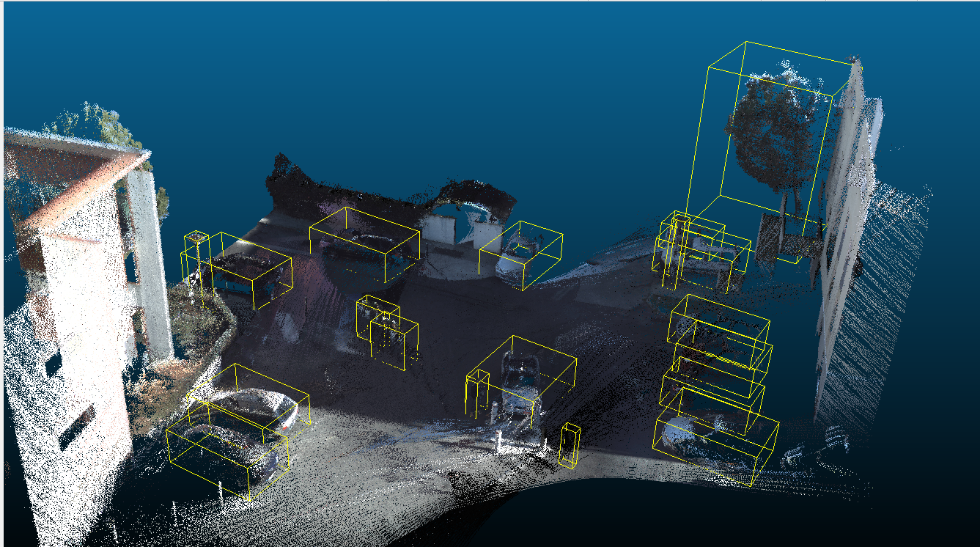
À partir d'un nuage de points LiDAR, il serait possible de détecter les objets de la scène 3D pour aider à la gestion d'une agglomération. Par exemple, savoir précisément combien d'arbres ou de poteaux il y a, et où ils sont situés, aiderait grandement à mettre à jour les bases de données d'objets urbains, à les trouver et à surveiller leur état. Il est particulièrement intéressant de suivre les objets qui subissent des changements constants, et l'exemple le plus notable sont les objets vivants comme les arbres. Les dispositifs LiDAR mobiles sont équipés d'émetteurs GNSS (Global Navigation Satellite System) qui géoréférencent les données pendant l'acquisition. Ainsi, tout objet urbain extrait du nuage de points peut être projeté dans un SIG (système d'information géographique) existant.



>En outre, en effectuant ces acquisitions sur une base quotidienne ou hebdomadaire, par exemple à l'aide de LiDAR montés sur des camions à ordures, les gestionnaires municipaux seraient en mesure d'avoir une image plus claire de l'évolution des infrastructures et des objets au fil du temps. Ils auraient ainsi une meilleure idée des situations particulières qui requièrent leur attention et de leur emplacement précis sur la carte. Pour pouvoir tenir de telles promesses, nous devons relever le plus grand défi technique de ce projet, à savoir extraire automatiquement des informations des nuages de points, en d'autres termes la reconnaissance de formes en 3D.
Reconnaissance des formes appliquée aux nuages de points LiDAR 3D
La reconnaissance des formes est entrée dans une ère de renouvellement complet avec le développement de l'apprentissage profond [1] dans la communauté académique ainsi que dans le monde industriel, en raison de la percée significative que ces algorithmes ont réalisée dans le traitement des images 2D au cours des cinq dernières années. Actuellement, la plupart des recherches sur l'apprentissage profond proviennent encore de l'imagerie 2D avec des défis tels que l'ILSVRC [2]. Cette augmentation soudaine des performances a donné naissance à de nouveaux algorithmes de détection d'objets robustes et en temps réel, comme le R-CNN plus rapide [3]. Cependant, leur généralisation aux données 3D n'est pas une tâche simple. C'est particulièrement vrai dans le cas des nuages de points 3D où l'information n'est pas structurée comme dans les mailles.


Ce projet fait l'objet de la thèse de Younes Zegaoui qui a débuté en novembre 2017 et devrait se conclure en novembre 2020. Dont l'objectif est de développer de nouvelles techniques de classification de formes 3D et de localisation d'objets urbains dans de grandes scènes acquises par LiDAR.