Demographic changes go together with an increase in the number of older adults whose life expectancy is higher than in previous years. An increase in age is often correlated with the presence of chronic diseases or polypathologies affecting autonomy. When the autonomy of the elderly person deteriorates, medical prescription allows access to health services and institutions (EHPAD, day care, rehabilitation center, SSIAD, SSAD). The objective of our research is to study the social organization within institutions welcoming dependent older adults and the impact of potentially introducing a social robot. In a co-design approach with professionals, the observation of behaviors, regulated by social rules and norms, will allow, in a coherent way with our empirical approach, to question the conditions necessary for the design of an acceptable human-robot interaction. The ethnographic observations, which was cancelled due to the Covid crisis, led us to use the “cultural probes” method combined with interviews, to better understand the daily work of health professionals. The analysis of the collected data allows us to identify 5 recurrent themes – Time and personnel, the health situation, Communication / Attention, Guiding, Activities – for which we have listed, in this article, the issues encountered, the questions raised and ideas of potential solution with the use of a social robot.
Context
In France, except for periods of war, life expectancy has been increasing since the end of the 19th century [1]. Indeed, progress in various domains – medicine, pharmacology and surgery – have allowed a decrease in mortality due to infectious diseases. In addition, the implementation of public health policies has also led the population to age in better health and longer. Thus, our life expectancy has almost doubled between 1890 and 2017, from 44 and 41 years to 85.6 and 79.7 years for women and men respectively [2]. Projections for the future are similar, since it is estimated that by 2050, one third of the French population will be aged 60 years and over [3,4]. This socio-demographic evolution raises new health and social issues in favor of an ethics of care [5] and access to care. Indeed, with an increase in the ageing population and in pathologies related to old age, we can imagine an increased demand on the care systems [6,7].
Currently, the care of the elderly in nursing homes (EHPAD in France) is based on exchanges between the resident him/her-self, family members, and the multidisciplinary team, in order to adapt the care and support. However, field observations empirically show us that existing procedures are difficult to implement because they are too time-consuming. The reality is, unfortunately, that understaffed caregivers do not have the time to give more attention to the elderly than the strict minimum necessary for their care [18]. Thus, it is not uncommon to observe breakdown disorders among the older adults, when they suffer from a feeling of abandonment [9], but also among caregivers, for whom exhaustion results from compassion fatigue [10].
Yet, there is evidence of concrete benefits for both the cared-for and the caregiver when the focus is on the ethics of care [11,12]. As Paperman [13] defines it: “The ethics of care emphasizes the importance of social relations organized around dependence and vulnerability“. This ethics of care leads to a reflection on “taking care” combining attention and responsibilities for the well-being of individuals and their interactions.
In this context we make the hypothesis of the potential contribution of Information and Communication Technologies (ICTs) in terms of interactions, which would benefit both the care staff and the residents. Our research question is: how would the introduction of a social robot within institutions welcoming elderly people impact the social order in place? The behaviors, governed by social rules and norms, or professional rules for the caregivers, will serve as object of analysis in our empirical and reflexive posture. This understanding of existing practices will inform the design of interaction interfaces with these machines.
Based on an ethnographic study integrated with a participatory approach [14,15], we question the introduction of a mobile social robot designed and used in an ethical way to interact with groups of people within these institutions and the natural interactions produced in the presence of this machine.
State of the art
Human-Robot interaction
Human-Robot Interaction (HRI) appeared in the 1980s and aims to study the different relationships between humans and robots. This field of research is vast because it includes many disciplines: Human Computer Interaction (HCI), sociology, computer science, psychology, neuroscience, proxemics, …
Indeed, the human factor influences positively and negatively the human-robot interaction. For example, gender would represent a first parameterization specificity in the machine influencing the interaction [16, 17]. According to Spatola [18], there are several factors to consider in the development of a robot:
- Its shape – more or less anthropomorphic
- Its communication mode – the different communication channels
- Its autonomy – relative to the time spent without human assistance
- Its interaction capacity – in terms of the degree of complexity of a dialogue

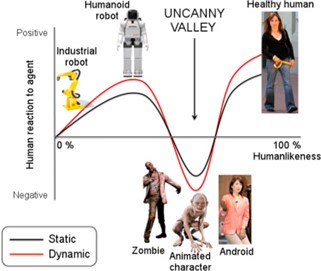
Figure 1 The uncanny valley (Mori & al. 2012)
Anthropomorphism is the subject of many studies in the field of HRI. As early as the 1970s, the work of Mori [19] established the hypothesis of a correlation between the degree of anthropomorphism and the acceptability of a robot, without however having proven it empirically. This research illustrates the limits of anthropomorphism, with the “Uncanny Valley“. The theoretical curve of robot acceptance indicates that the more humanoid the design, the more the robot is accepted. However, if we go beyond a certain point in the resemblance, we are in the “Uncanny Valley”: the resemblance is then so astonishing that it becomes strange, and this time the acceptance drops. (figure 1)
According to Duffy [21], anthropomorphism should not aim at building an artificial human, but rather to allow a better integration in the already established social organization. The author defines the notion of artificial sociability by associating it to 5 basic emotional skills: self-awareness, emotion management, motivation, empathy and social skills. This would represent, in short, an ability to monitor one’s own emotions and those of others, to distinguish between them and to use them to guide one’s behavior [22].
Ozaki & al [23,24] have recently studied the ability of a social receptionist robot to predict and anticipate the reactions of customers in order to avoid disturbing a person who would not want to interact or, on the contrary, to engage in the interaction.
Interactional capabilities
In our case, the robot must show appropriate social capabilities for interaction, i.e., ease-of-use, coupled with efficiency of communication (with stereotyped communication signals such as head shaking or gaze). To meet these prerogatives, Duffy [21] gives us some guidelines for a social interaction robot:

Object of the study

Figure 2 TIAGo Iron
We chose to use the TIAGo Iron robot developed by Pal Robotics for its open technology (Robot Operating System), adaptable to research projects. (figure 2)
The first part of our study is devoted to the observation of social behaviors and real work practices [28,29] in a medical-social institution in the field of geriatrics. These observation data will try to answer the research question:
How could the robot be useful and/or pleasant in their daily life?
Methodology
Any interaction is composed of rules and social codes specific to the place or status of the participants [30]. We therefore decided to study these social exchanges with the aim of integrating the rules that govern them into the design of an acceptable human-robot interaction and thus, hypothetically, allow the machine to adapt to the social situation. This preliminary study of professional practices with the elderly is inspired by the sociology of interaction, and in particular by Erving Goffman’s method of ethnographic observation [31].
The immersion was supposed to start in 2020. However, the institutions cancelled the visits due to the pandemic. Indeed, the spread of the Covid-19 virus encouraged the French government to reorganize a lockdown. In an effort to protect their residents, facility managers stopped all visits from outsiders. With this impossibility of observing the daily life and real work practices of professionals, we wondered how to collect qualitative data when our access to the facilities and participants was restricted.
Cultural probes
The method of cultural probes [32] appeared to be a good solution, both for maintaining regular contact with the participants and for collecting qualitative data during this particular period. These “cultural probes” are presented as information collection kits and are distributed to the participants. After filling-in, they allow the researcher a “window” into the participant’s life, and in our case, allow to better understand the daily work of the professionals. They also served as a support during the a posteriori interviews with the participants, to explore various themes raised by their answers.
Figure 3 Kit with activities and materials
We recruited 4 professional participants from the same institution in November: a psychologist, two caregivers and a nurse. We created a kit of 10 fun and quick activities to question their daily work and their a priori vision of the immersion of a robot in the nursing home where they are working. Our handmade kit contained all the activities and was accompanied by creative materials (pencils and markers, pens, stickers, glue). (Figure 3).
To create the different activities, we first established the objectives of each exercise. Then, we determined clear instructions and the concrete design of the activity.
In total, 10 activities were created:





Interviews and observations
After the reopening of the different nursing homes, we also used semi-structured interviews [33] to collect needs. We planned interviews during participant observations or during a dedicated time.
These interviews focused on the interviewee’s daily work practices. We first asked the participant to introduce himself or herself, as well as his or her daily professional activity. Then we asked about the difficulties encountered during the day and the solutions put in place to overcome these difficulties. We then brought the reflection on the implementation of a robotic technology and how a mobile social robot could fit in and support these professional practices. Finally, we asked the professional about the ethical aspects and the questions that the implementation of such a technology could raise.
The interviews were conducted either during the observations or separately for the cultural probe participants.
Participant observation allows the researcher to question the actors, to return with them to an action that has just taken place. This allows the actor to leave the framework of his representation (an act of care, for example) for a reflexive work on his own practices by positioning himself as a spectator to question the situation together – What facade to adopt in this situation? How to remain coherent with the socially acceptable? What is expected from me? We are convinced of the relevance of this method when it comes to discussing issues related to the ethics of care [35].
Data analysis
For this article, we present the analysis of data collected out from 4 cultural probes and 8 interviews. These data were collected in two different establishments: a nursing home and a day care center, with the participation of two psychologists, an animator, a medical-psychological assistant, two nurses, two care assistants, and a person in civic service.
In the first instance, the data relating to professional practices were isolated beforehand to create personas.
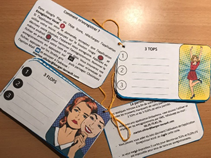
These personas, together with scenarios, will be useful in the following co-design process in group sessions. The personas are not portraits of real people but are inspired by observed behaviors or information given in interviews [36, 37]. The data collected about work practices are used as a basis for the construction of these portraits. (See an example in Figure 4)
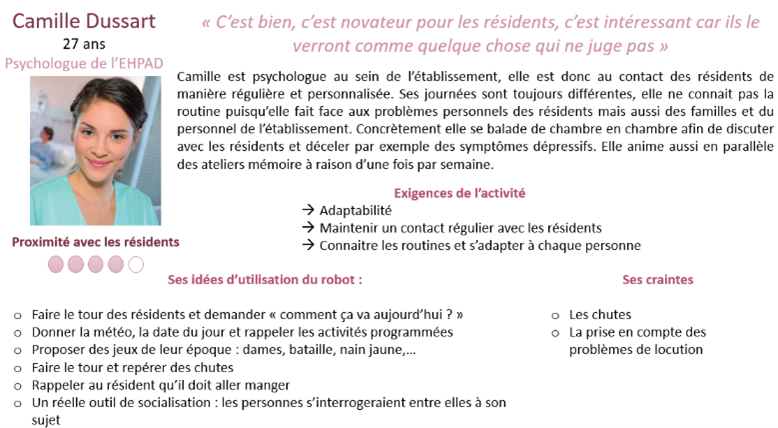
Figure 4 Example of persona
As a second step, we collected the verbatims related to the problems and solution ideas with a robot on post-its, and then we assembled them in the form of a mind map to allow us to differentiate several recurrent themes in the collected data (see Figure 5).
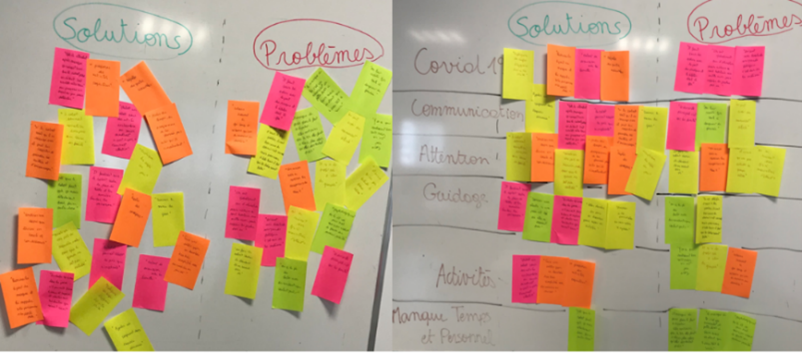
Figure 5 Mindmap with verbatims
Several sets could be grouped according to different themes:
Time and staff shortages
When we invited the professionals to reflect on the difficulties of their daily life, the care workers unanimously mentioned the lack of personnel and therefore the lack of time:
Thus, we can imagine a robot relieving caregivers of certain activities (other than those of care) in order to leave more time for the staff. This also alerts us on the fact that we must be careful not to add an additional task, but rather to insert the robot into an already established practice, having understood it beforehand. This will require a simplified interface for the staff to start the robot and for it to stay autonomous as long as possible (active without human help).
The overwork mentioned by the professionals is not only the consequence of physical tasks but it is also due to the unceasing solicitations of the residents.
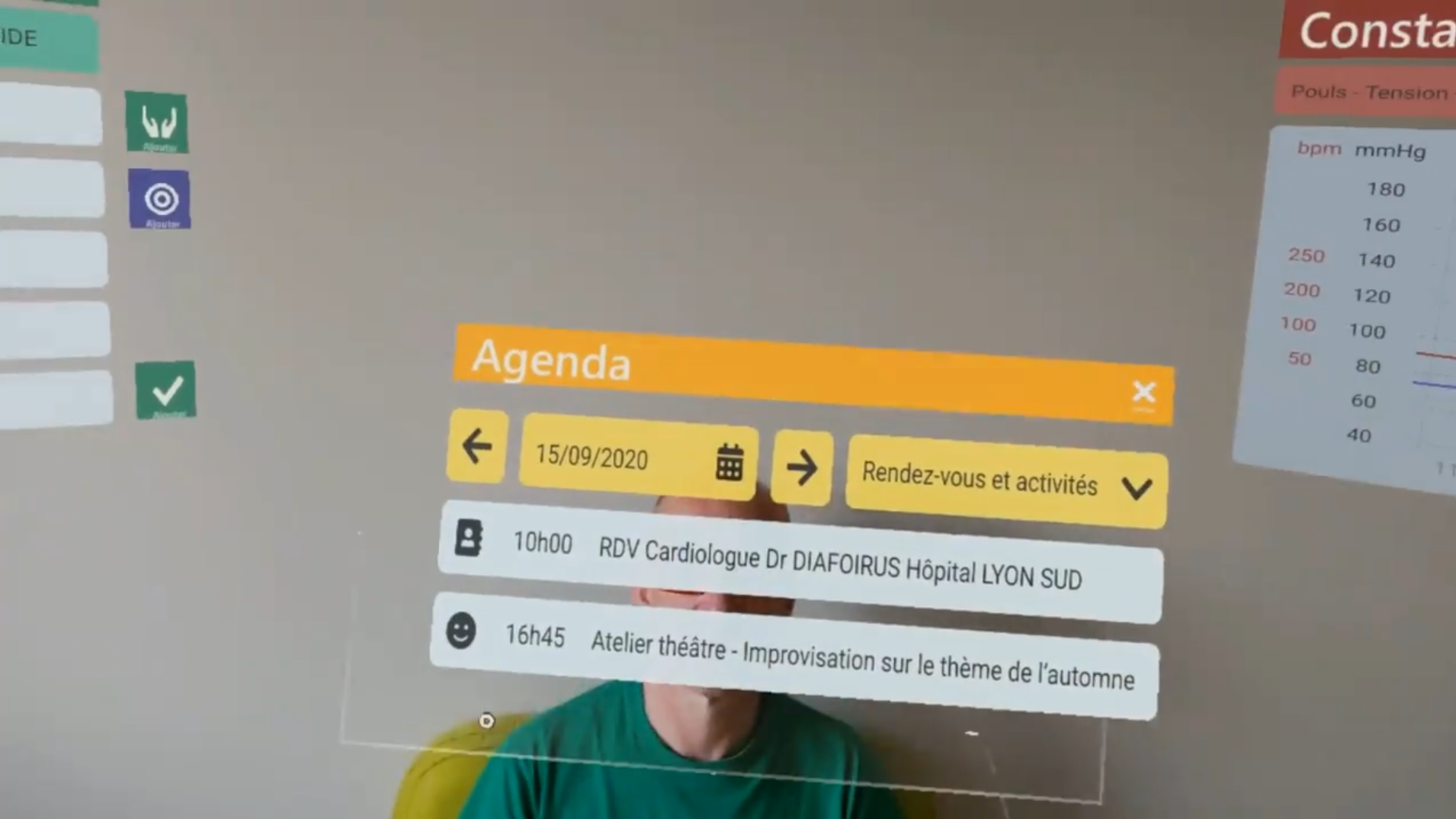
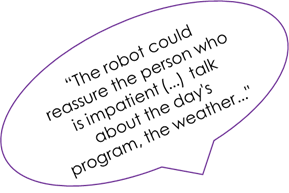
Faced with this recurring problem mentioned during the interviews, several participants put forward the idea of an information robot that would allow people to find their way around in time and space.
The robot would respond to recurrent requests from people by telling them, for example, the time of the day or the activity to come. We can think that these solicitations by frail people are a way to reassure themselves by a human presence, it will therefore be very interesting to analyze the observations with a robotic response.

Figure 6 Examples of scenarios written by the participants
Health situation
The moral fatigue of the staff is accentuated by the current conditions linked to the health context that we know. Among the elderly, too, we feel a weariness since observations show that few of them are motivated to attend the collective entertainments.
To remedy this, the interviewed participants agree that the support of a social robot could be an aid to repeat the protective measures or be a vector of motivation to participate in group activities. This would reduce the numerous demands that are morally tiring.
Figure 7 Exemple of a postcard written by a participant
Communication/Attention
We were also shown that the crisis had been a leverage for the entry of digital technology in the lives of some older residents. Indeed, with the help of the animator, they were able to stay in contact with their family. The robot could then also come in support to maintain this link, in particular with the help of videoconference calls.
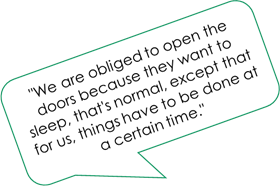
The daily life and comfort of the resident is very important for these professionals interviewed, who are concerned about the well-being of everyone. From the beginning of the day, the resident is at the heart of the thoughts of these care professionals. One caregiver shared with us her discomfort with waking up the residents.
This same participant, in the course of her reflection, expressed the wish for a robot that would come and gently wake/stimulate the resident with music or soft words for example, before their intervention in the room to avoid having to wake the person themselves.
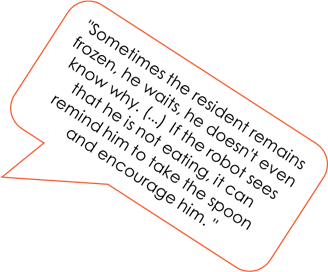
Verbal stimulation seems to be an idea to stimulate the elderly, but also sometimes to canalize them.
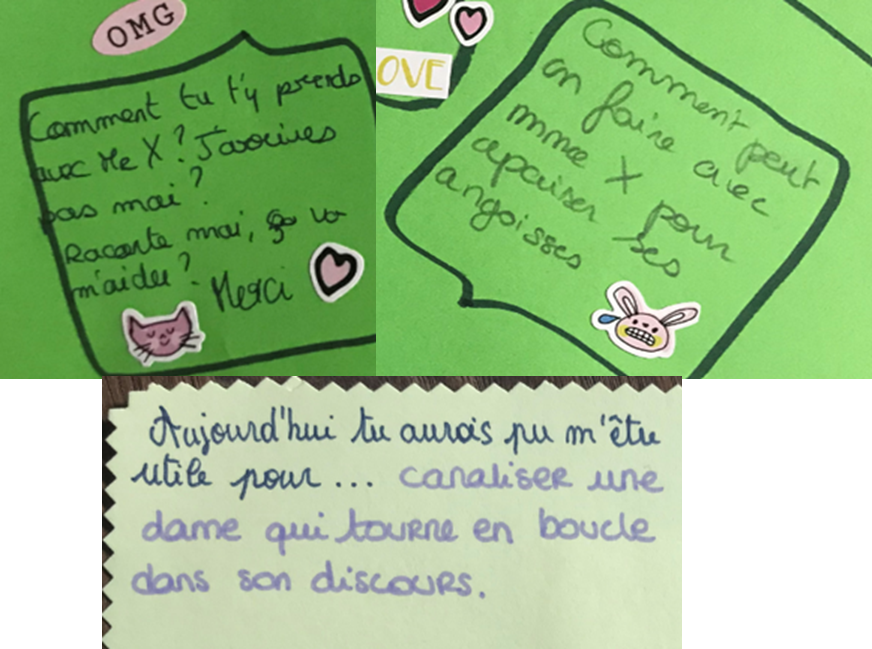
Figure 8 Examples of productions collected in cultural probes
Guiding
For these people, who sometimes have cognitive difficulties, finding their way around becomes difficult. Often, the person moves around but when he finds himself in the corridor he don’t know what to do . In these moments, ideas converged on a robot that would guide the person to the seat.

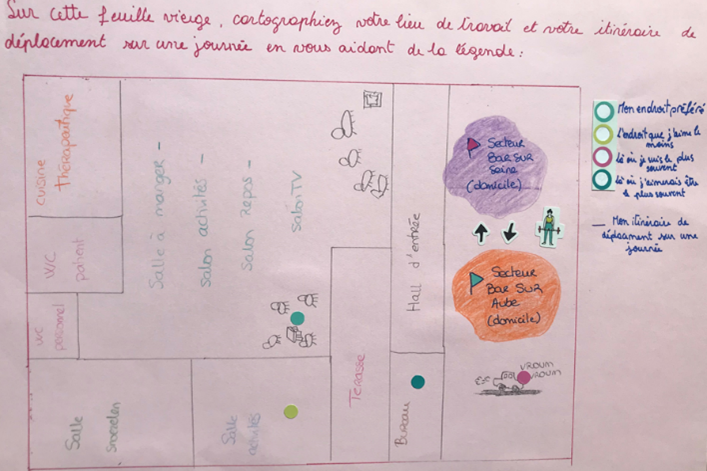
Figure 9 Example of a map made by a participant
Activities
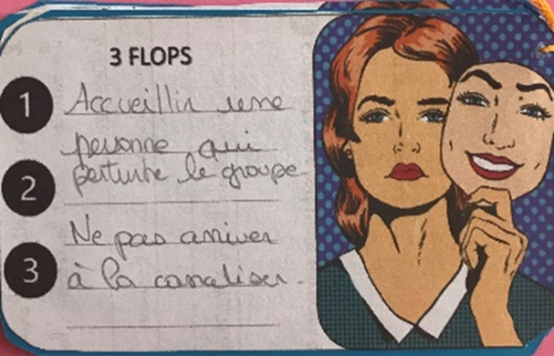
Figure 10 Example of “Flops”
It is not uncommon to observe very different profiles in group facilitation sessions at the nursing home or for groups of people at the Day Care Center. This heterogeneity can have an impact on the whole group.
To manage these challenging behaviours, many caregivers believe that cognitive or individual activities could help canalize the person to make them more available to the group or vice versa.
Perspectives
The ethnographic study is still in progress in different institutions. Based on the data collected so far, the next step will be to co-design scenarios of robot use with users. Concretely, the scenarios will serve as a presentation and as a support for group discussion, in an iterative process of adjustment.
These co-design sessions will take place during dedicated participatory workshops organized within UTT’s ActivAgeing Living Lab, taking care to constitute representative groups with actors from different institutions: health professionals, caregivers, older adults from different nursing homes.
Once we have made choices for the acceptable human-robot interaction design and use, we can test the robot in an experimental and iterative way, during field trials. This will allow us to observe the behaviors and interactions around this machine. We will imagine several forms of interactions to observe during the introduction of the robot.
We will imagine several forms of interactions to observe during the introduction of the robot.
- People talk to each other, about the robot which then represents a non-ratified participant in the interaction (according to Goffman [40])
- A person addresses the robot and vice versa, the interaction is between ratified participants
- The interaction and turns of speech are between the robot, a caregiver and an elderly person for example (one of the participants who is not addressed but hears the conversation is represented as a non-ratified participant according to Goffman as well)
In parallel, the work on the Human-Robot Interaction design will focus more technically on speech recognition and navigation, to achieve a user-friendly robot.
Conclusion

References
[1] Blanpain N., «De 2,8 millions de seniors en 1870 en France à 21,9 millions en 2070?», in France, portrait social, coll. «Insee Références», édition 2018.
[2] Papon, S., & Beaumel, C. (2020). Bilan démographique 2019. La fécondité se stabilise en France.
[3] United Nations, (2019), World populations prospects. https://population.un.org/wpp/Graphs/DemographicProfiles/Pyramid/250
[4] Tournadre, N. (2002). La population de la France métropolitaine en 2050: un vieillissement inéluctable. Economie et statistique, 355(1), 57-71.
[5] Tronto, J., & Maury, H. (2009). Un monde vulnérable. Pour une politique du” care”. Lectures, Les rééditions.
[6] Muller, F., Denis, B., Valentin, C., & Teillet, L. (2004). Vieillissement humain: évolution démographique et implications médicales. Nutrition clinique et métabolisme, 18(4), 171-174.
[7] Chassang, M. & Gautier, A. (2019). Les maladies chroniques, avis du CESE [document PDF], JO de la république française. doi : https://www.lecese.fr/sites/default/files/pdf/Avis/2019/2019_14_maladies_chroniques.pdf
[8] Éloi, M. & Martin, P. (2017). La personne au centre de la prise en charge en EHPAD : entre règles, pratiques et représentations. Revue française des affaires sociales, 21-40. doi:10.3917/rfas.171.0021.
[9] Kuhnel, M. L., El Iraki, I., Tranchant, M., & Aspe, G. (2010). Prévalence de la dépression en EHPAD: nécessité d’une approche gérontopsychiatrique. NPG Neurologie-Psychiatrie-Gériatrie, 10(57), 111-115.
[10] Thomas, P., Barruche, G., & Hazif-Thomas, C. (2012). La souffrance des soignants et fatigue de compassion. La revue francophone de gériatrie et de gérontologie, 19(187), 266-273.
[11] Bailleul, M., & Marie-Bailleul, G. (2020). Éthique de la sollicitude dans une unité cognitivo-comportementale: des «proofs of care» aux «outils pour le care». NPG Neurologie-Psychiatrie-Gériatrie.
[12] Guérin S. Pour une éthique concrète de la sollicitude; 2016[https://www.espace-ethique.org/ressources/article/pour-une-ethique-concrete-de-la-sollicitude. Consulté le3 septembre 2020].
[13] Paperman, P. (2010). Éthique du care : un changement de regard sur la vulnérabilité. Gérontologie et société, 2(2), 51-61. https://doi.org/10.3917/gs.133.0051
[14] Blomberg, J., & Karasti, H. (2012). Positioning ethnography within participatory design. Routledge international handbook of participatory design, 86-116.
[15] Crabtree, A. (1998, November). Ethnography in participatory design. In Proceedings of the 1998 Participatory design Conference (pp. 93-105).
[16] Eyssel, F., & Hegel, F. (2012). (s) he’s got the look: Gender stereotyping of robots 1. Journal of Applied Social Psychology, 42(9), 2213-2230.
[17] Callaway, C., & Sima’an, K. (2006). Wired for speech: How voice activates and advances the human-computer relationship. Computational Linguistics, 32(3), 451-452.
[18] Spatola, N. (2019). L’interaction Homme-Robot, de l’anthropomorphisme à l’humanisation. LAnnee psychologique, 119(4), 515-563.
[19] Mori, M., MacDorman, K. F., & Kageki, N. (2012). The uncanny valley [from the field]. IEEE Robotics & Automation Magazine, 19(2), 98-100.
[20] Shneiderman, B. (1993). 7, 1 A nonanthropomorphic style guide: overcoming the Humpty Dumpty syndrome. Sparks of innovation in human-computer interaction (1993), 331.
[21] Duffy, B. R. (2003). Anthropomorphism and the social robot. Robotics and autonomous systems, 42(3-4), 177-190.
[22] Goleman, D. (1995). Emotional Intelligence Bantam Books. New York.
[23] Moga, S. D. (2000). Apprendre par imitation: une nouvelle voie d’apprentissage pour les robots autonomes (Doctoral dissertation, Cergy-Pontoise
[24] Ozaki, Y., Ishihara, T., Matsumura, N., Nunobiki, T., & Yamada, T. (2018, August). Decision-making prediction for human-robot engagement between pedestrian and robot receptionist. In 2018 27th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN) (pp. 208-215). IEEE
[25] Ozaki, Y., Ishihara, T., Matsumura, N., & Nunobiki, T. (2019). Can User-Centered Reinforcement Learning Allow a Robot to Attract Passersby without Causing Discomfort?. arXiv preprint arXiv:1903.05881.
[26] Michalowski, M. P., Sabanovic, S., & Simmons, R. (2006, March). A spatial model of engagement for a social robot. In 9th IEEE International Workshop on Advanced Motion Control, 2006. (pp. 762-767). IEEE.
[27] Goffman, E., & Kihm, A. (1973). La mise en scène de la vie quotidienne (Vol. 2). Paris: Minuit.
[28] Randall, D., Harper, R., & Rouncefield, M. (2007). Fieldwork for design: theory and practice. Springer Science & Business Media.
[29] Schmidt, K. (2018). Practice and technology: on the conceptual foundations of practice-centered computing. In Socio-informatics: A Practice-based Perspective on the Design and Use of IT Artifacts (pp. 47-103). Oxford University Press.
[30] Watzlawick, P., Beavin, J. H., Jackson, D. D., & Morche, J. (1972). Une logique de la communication
[31] Goffman, E. (1975). Stigmate. Les usages sociaux des handicaps. Paris, Éditions de Minuit.
[32] Gaver, William & Dunne, Anthony & Pacenti, Elena. (1999). Design: Cultural Probes. Interactions. 6. 21-29. 10.1145/291224.291235.
[33] Britten, Nicky. (1995). Qualitative Interviews in Medical Research. BMJ (Clinical research ed.). 311. 251-3. 10.1136/bmj.311.6999.251.
[34] Bastien, S. (2007). Observation participante ou participation observante? Usages et justifications de la notion de participation observante en sciences sociales. Recherches qualitatives, 27(1), 127-140.
[35] Hennion, A., & Vidal-Naquet, P. A. (2015). «Enfermer Maman!» Épreuves et arrangements: le care comme éthique de situation. Sciences sociales et santé, 33(3), 65-90.
[36] Cooper, A., Reimann, R., Cronin, D., & Noessel, C. (2014). About face: the essentials of interaction design. John Wiley & Sons.
[37] Nielsen, Lene, Personas. In: Soegaard, Mads and Dam, Rikke Friis (eds.). The Encyclopedia of Human-Computer Interaction, 2nd Ed. Aarhus, Denmark: The Interaction Design Foundation, 2013:
[38] Carroll, J. M. (Ed.). (1995). Scenario-based design: envisioning work and technology in system development. John Wiley & Sons, Inc..
[39] Kitzinger, J. (1995). Qualitative research: introducing focus groups. Bmj, 311(7000), 299-302.
[40] Goffman, E. (1987). Façon de parler, traduit par A. Kihm, Paris: Éditions de Minuit, coll.«Le Sens commun ».