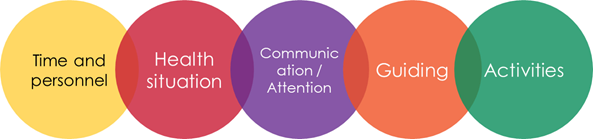
Les changements démographiques vont de pair avec une augmentation du nombre de personnes âgées dont l'espérance de vie est plus élevée que les années précédentes. L'augmentation de l'âge est souvent corrélée à la présence de maladies chroniques ou de polypathologies affectant l'autonomie. Lorsque l'autonomie de la personne âgée se dégrade, la prescription médicale permet l'accès aux services et établissements de santé (EHPAD, accueil de jour, centre de rééducation, SSIAD, SSAD). L'objectif de notre recherche est d'étudier l'organisation sociale au sein des établissements accueillant des personnes âgées dépendantes et... l'impact de l'introduction éventuelle d'un robot social. Dans un co-design L'approche avec les professionnels, l'observation des comportements, régulés par des règles et normes sociales, permettra, de manière cohérente avec notre approche empirique, de questionner les conditions nécessaires à la conception d'une interaction homme-robot acceptable. Les observations ethnographiques, qui ont été annulées en raison de la crise du Covid, nous ont conduit à utiliser la méthode "les sondes culturelles" combinée à des entretiens, afin de mieux comprendre le travail quotidien des professionnels de la santé. L'analyse des données recueillies permet d'identifier 5 thèmes récurrents - Le temps et le personnel, la situation sanitaire, la communication / l'attention, le guidage, les activités - pour lesquels nous avons répertorié, dans cet article, les problèmes rencontrés, les questions soulevées et les idées de solution potentielle avec l'utilisation d'un robot social.
Contexte
En France, à l'exception des périodes de guerre, l'espérance de vie augmente depuis la fin du XIXe siècle [1]. En effet, les progrès dans différents domaines - médecine, pharmacologie et chirurgie - ont permis une diminution de la mortalité due aux maladies infectieuses. De plus, la mise en place de politiques de santé publique a également conduit la population à vieillir en meilleure santé et plus longtemps. Ainsi, notre espérance de vie a presque doublé entre 1890 et 2017, passant de 44 et 41 ans à 85,6 et 79,7 ans pour les femmes et les hommes respectivement [2]. Les projections pour l'avenir sont similaires, puisqu'on estime qu'en 2050, un tiers de la population française sera âgée de 60 ans et plus [3,4]. Cette évolution socio-démographique soulève de nouvelles la santé et les questions sociales en faveur d'une éthique du soin [5] et de l'accès aux soins. En effet, avec l'augmentation de la population vieillissante et des pathologies liées à la vieillesse, on peut imaginer une demande accrue sur les systèmes de soins [6,7].
Actuellement, la prise en charge des personnes âgées en maison de retraite (EHPAD en France) est basée sur des échanges entre le résident lui-même, ses proches et l'équipe pluridisciplinaire, afin d'adapter les soins et l'accompagnement. Cependant, les observations de terrain nous montrent empiriquement que les procédures existantes sont difficiles à mettre en œuvre car trop chronophages. La réalité est, malheureusement, que les soignants en sous-effectif n'ont pas le temps d'accorder plus d'attention aux personnes âgées que le strict minimum nécessaire à leur prise en charge [18]. Ainsi, il n'est pas rare d'observer troubles de la rupture chez les personnes âgées, lorsqu'elles souffrent d'un sentiment d'abandon [9], mais aussi chez les aidants, pour qui l'épuisement résulte de l'épuisement de la compassion [10].
Pourtant, il est prouvé qu'il existe des avantages concrets tant pour la personne soignée que pour l'aidant lorsque l'accent est mis sur l'élément suivant l'éthique des soins [11,12]. Comme le définit Paperman [13] : "L'éthique des soins souligne l'importance des relations sociales organisées autour de la dépendance et de la vulnérabilité.". Cette éthique du care conduit à une réflexion sur le " prendre soin " combinant attention et responsabilités pour le bien-être des individus et de leurs interactions.
Dans ce contexte, nous émettons l'hypothèse de l'apport potentiel des technologies de l'information et de la communication (TIC) en termes d'interactions, ce qui bénéficierait à la fois au personnel soignant et aux résidents. Notre question de recherche est la suivante : comment les introduction d'un robot social au sein des institutions accueillant des personnes âgées impactent l'ordre social en place ? Les comportements, régis par des règles et normes sociales, ou des règles professionnelles pour les soignants, serviront d'objet d'analyse dans notre posture empirique et réflexive. Cette compréhension des pratiques existantes permettra d'éclairer la conception des interfaces d'interaction avec ces machines.
Sur la base d'une étude ethnographique intégrée à une approche participative [14,15], nous questionnons l'introduction d'un robot social mobile conçu et utilisé de manière éthique pour interagir avec des groupes de personnes au sein de ces institutions et les interactions naturelles produites en présence de cette machine.
L'état de l'art
Interaction homme-robot
Apparue dans les années 1980, l'interaction homme-robot (IHB) vise à étudier les différentes relations entre les humains et les robots. Ce champ de recherche est vaste car il regroupe de nombreuses disciplines : Interaction homme-machine (IHM), sociologie, informatique, psychologie, neurosciences, proxémique, ....
En effet, le facteur humain influence positivement et négativement l'interaction homme-robot. Par exemple, le sexe représenterait une première spécificité de paramétrage de la machine influençant l'interaction [16, 17]. Selon Spatola [18], il y a plusieurs facteurs à prendre en compte dans le développement d'un robot :
- Son forme - plus ou moins anthropomorphes
- Son communication mode - les différents canaux de communication
- Son autonomie - par rapport au temps passé sans assistance humaine
- Son interaction capacité - en termes de degré de complexité d'un dialogue

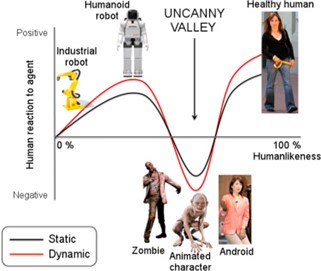
Figure 1 La vallée étrange (Mori & al. 2012)
L'anthropomorphisme fait l'objet de nombreuses études dans le domaine des HRI. Dès les années 1970, les travaux de Mori [19] ont établi l'hypothèse d'une corrélation entre le degré d'anthropomorphisme et l'acceptabilité d'un robot, sans toutefois l'avoir prouvé empiriquement. Cette recherche illustre les limites de l'anthropomorphisme, avec le "Uncanny Valley". La courbe théorique de l'acceptation des robots indique que plus le design est humanoïde, plus le robot est accepté. Cependant, si l'on dépasse un certain point de ressemblance, on se trouve dans la " Uncanny Valley " : la ressemblance est alors si étonnante qu'elle devient étrange, et cette fois l'acceptation chute. (figure 1)
Selon Duffy [21], l'anthropomorphisme ne doit pas viser à construire un humain artificiel, mais plutôt à permettre une meilleure intégration dans l'organisation sociale déjà établie. L'auteur définit la notion de sociabilité artificielle en l'associant à 5 compétences émotionnelles de base : conscience de soi, émotion management, motivation, empathie et compétences sociales. Cela représenterait, en somme, une capacité à surveiller ses propres émotions et celles des autres, à les distinguer et à les utiliser pour guider son comportement [22].
Ozaki & al [23,24] ont récemment étudié la capacité d'un robot d'accueil social à prédire et anticiper les réactions des clients afin d'éviter de déranger une personne qui ne voudrait pas interagir ou, au contraire, de s'engager dans l'interaction.
Capacités interactionnelles
Dans notre cas, le robot doit montrer des capacités sociales appropriées pour l'interaction, c'est-à-dire une facilité d'utilisation, couplée à une efficacité de communication (avec des signaux de communication stéréotypés tels que le secouement de tête ou le regard). Pour répondre à ces prérogatives, Duffy [21] nous donne quelques lignes directrices pour une robot d'interaction sociale:

Objet de l'étude

Figure 2 TIAGo Fer
Nous avons choisi d'utiliser le robot TIAGo Iron développé par Pal Robotics pour sa technologie ouverte (Robot Operating System), adaptable aux projets de recherche. (figure 2)
La première partie de notre étude est consacrée à l'observation de comportements sociaux et réel les pratiques de travail [28,29] dans un établissement médico-social dans le domaine de la gériatrie. Ces données d'observation tenteront de répondre à la question de recherche :
Comment le robot pourrait-il être utile et/ou agréable dans leur vie quotidienne ?
Méthodologie
Toute interaction est composée de règles et de codes sociaux propres au lieu ou au statut des participants [30]. Nous avons donc décidé d'étudier ces échanges sociaux dans le but d'intégrer les règles qui les régissent dans la conception d'une interaction homme-robot acceptable et ainsi, hypothétiquement, permettre à la machine de s'adapter à la situation sociale. Cette étude préliminaire des pratiques professionnelles avec les personnes âgées s'inspire de la sociologie de l'interaction, et en particulier de la méthode d'observation ethnographique d'Erving Goffman [31].
L'immersion était censée commencer en 2020. Cependant, les institutions ont annulé les visites en raison de la pandémie. En effet, la propagation du virus Covid-19 a encouragé le gouvernement français à réorganiser un lockdown. Dans le but de protéger leurs résidents, les responsables des établissements ont stoppé toute visite de personnes extérieures. Face à cette impossibilité d'observer le quotidien et les pratiques réelles de travail des professionnels, nous nous sommes demandés comment recueillir des données qualitatives lorsque notre accès aux établissements et aux participants était restreint.
Sondes culturelles
La méthode de les sondes culturelles Les sondes culturelles [32] sont apparues comme une bonne solution, à la fois pour maintenir un contact régulier avec les participants et pour recueillir des données qualitatives pendant cette période particulière. Ces "sondes culturelles" se présentent comme des kits de collecte d'informations et sont distribuées aux participants. Après avoir été remplies, elles permettent au chercheur d'ouvrir une "fenêtre" sur la vie du participant et, dans notre cas, de mieux comprendre le processus d'apprentissage. travail quotidien des professionnels. Ils ont également servi de support lors des entretiens a posteriori avec les participants, pour explorer les différents thèmes soulevés par leurs réponses.
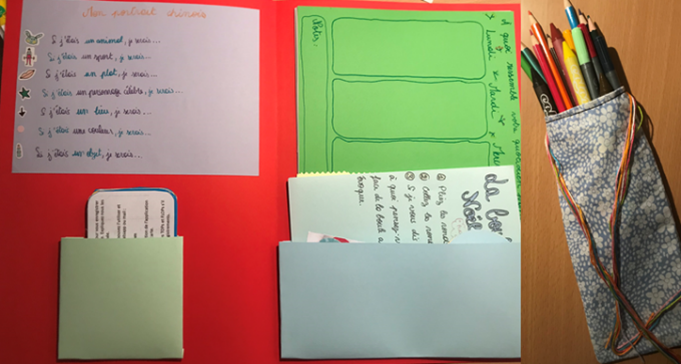
Figure 3 Kit avec activités et matériel
Nous avons recruté 4 participants professionnels d'une même institution en novembre : un psychologue, deux aides-soignants et une infirmière. Nous avons créé un kit de 10 activités ludiques et rapides pour questionner leur travail quotidien et leur vision a priori de l'immersion d'un robot dans la maison de retraite où ils travaillent. Notre kit artisanal contenait toutes les activités et était accompagné de matériel créatif (crayons et feutres, stylos, autocollants, colle). (Figure 3).
Pour créer les différentes activités, nous avons d'abord établi les objectifs de chaque exercice. Ensuite, nous avons déterminé des instructions claires et la conception concrète de l'activité.
Au total, 10 activités ont été créées :





Entretiens et observations
Après la réouverture des différentes maisons de retraite, nous avons également utilisé des entretiens semi-structurés [33] pour recueillir les besoins. Nous avons planifié les entretiens pendant les observations des participants ou pendant un temps dédié.
Ces entretiens ont porté sur les aspects suivants de la personne interrogée pratiques de travail quotidiennes. Nous avons d'abord demandé au participant de se présenter, ainsi que son activité professionnelle quotidienne. Puis nous l'avons interrogé sur les difficultés rencontrées au cours de la journée et les solutions mises en place pour surmonter ces difficultés. Nous avons ensuite amené la réflexion sur la mise en place d'une technologie robotique et comment un robot social mobile pourrait s'intégrer et soutenir ces pratiques professionnelles. Enfin, nous avons interrogé le professionnel sur les aspects éthiques et les questions que la mise en œuvre d'une telle technologie pourrait soulever.
Les entretiens ont été menés soit pendant les observations, soit séparément pour les participants à la sonde culturelle.
Observation des participants permet au chercheur d'interroger les acteurs, de revenir avec eux sur une action qui vient de se dérouler. Cela permet à l'acteur de sortir du cadre de sa représentation (un acte de soin, par exemple) pour un travail réflexif sur ses propres pratiques en se positionnant comme spectateur pour questionner ensemble la situation - Quelle façade adopter dans cette situation ? Comment rester cohérent avec le socialement acceptable ? Qu'attend-on de moi ? Nous sommes convaincus de la pertinence de cette méthode lorsqu'il s'agit de discuter des questions liées à l'éthique du soin [35].
Analyse des données
Dans cet article, nous présentons l'analyse des données recueillies à partir de 4 sondes culturelles et de 8 entretiens. Ces données ont été recueillies dans deux établissements différents : une maison de retraite et un centre de jour, avec la participation de deux psychologues, d'un animateur, d'une aide médico-psychologique, de deux infirmières, de deux aides-soignantes et d'une personne en service civique.
Dans un premier temps, les données relatives aux pratiques professionnelles ont été préalablement isolées afin de créer personas.
Ces personas, ainsi que les scénarios, seront utiles dans le processus de co-conception suivant lors de sessions de groupe. Les personas ne sont pas des portraits de personnes réelles mais sont inspirés de comportements observés ou d'informations données lors d'entretiens [36, 37]. Les données recueillies sur les pratiques de travail sont utilisées comme base pour la construction de ces portraits. (Voir un exemple dans la figure 4)
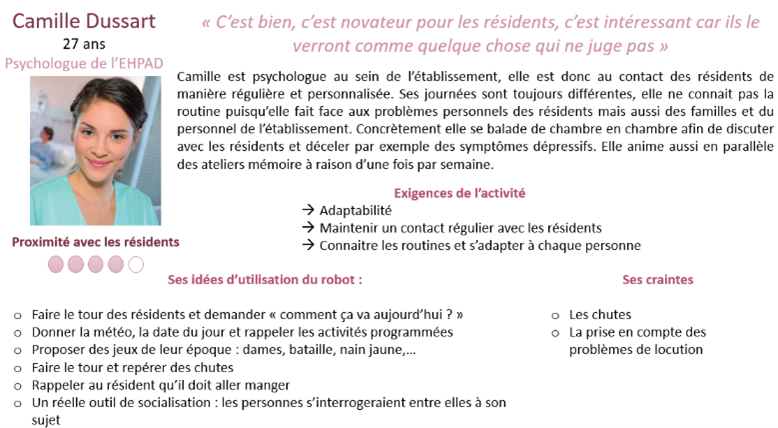
Figure 4 Exemple de persona
Dans un deuxième temps, nous avons collecté les verbatims relatifs aux problèmes et aux idées de solution à l'aide d'un robot sur des post-its, puis nous les avons assemblés sous la forme d'une carte heuristique afin de nous permettre de différencier plusieurs thèmes récurrents dans les données collectées (voir Figure 5).
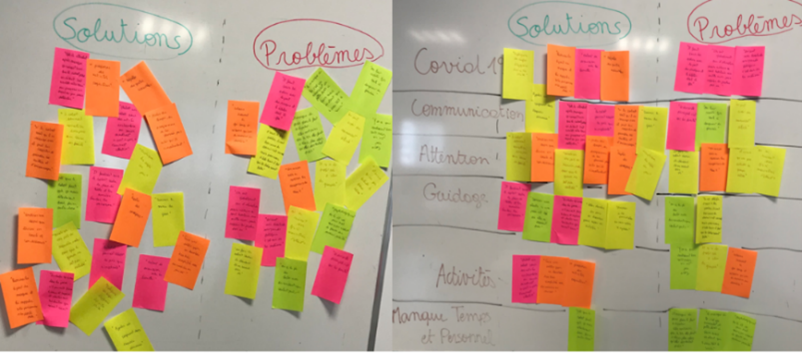
Figure 5 Mindmap avec verbatims
Plusieurs ensembles pourraient être regroupés en fonction de différents thèmes :
Manque de temps et de personnel
Lorsque nous avons invité les professionnels à réfléchir aux difficultés de leur quotidien, les soignants ont unanimement mentionné le manque de personnel et donc le manque de temps :
Ainsi, on peut imaginer un robot soulager les aidants de certaines activités (autres que celles de soins) afin de laisser plus de temps au personnel. Cela nous alerte également sur le fait qu'il faut veiller à ne pas ajouter une tâche supplémentaire, mais plutôt à insérer le robot dans une pratique déjà établie, en l'ayant comprise au préalable. Cela nécessitera une interface simplifiée pour que le personnel puisse démarrer le robot et qu'il reste autonome le plus longtemps possible (actif sans aide humaine).
La surcharge de travail mentionnée par les professionnels n'est pas seulement la conséquence des tâches physiques mais elle est aussi due aux sollicitations incessantes des résidents.
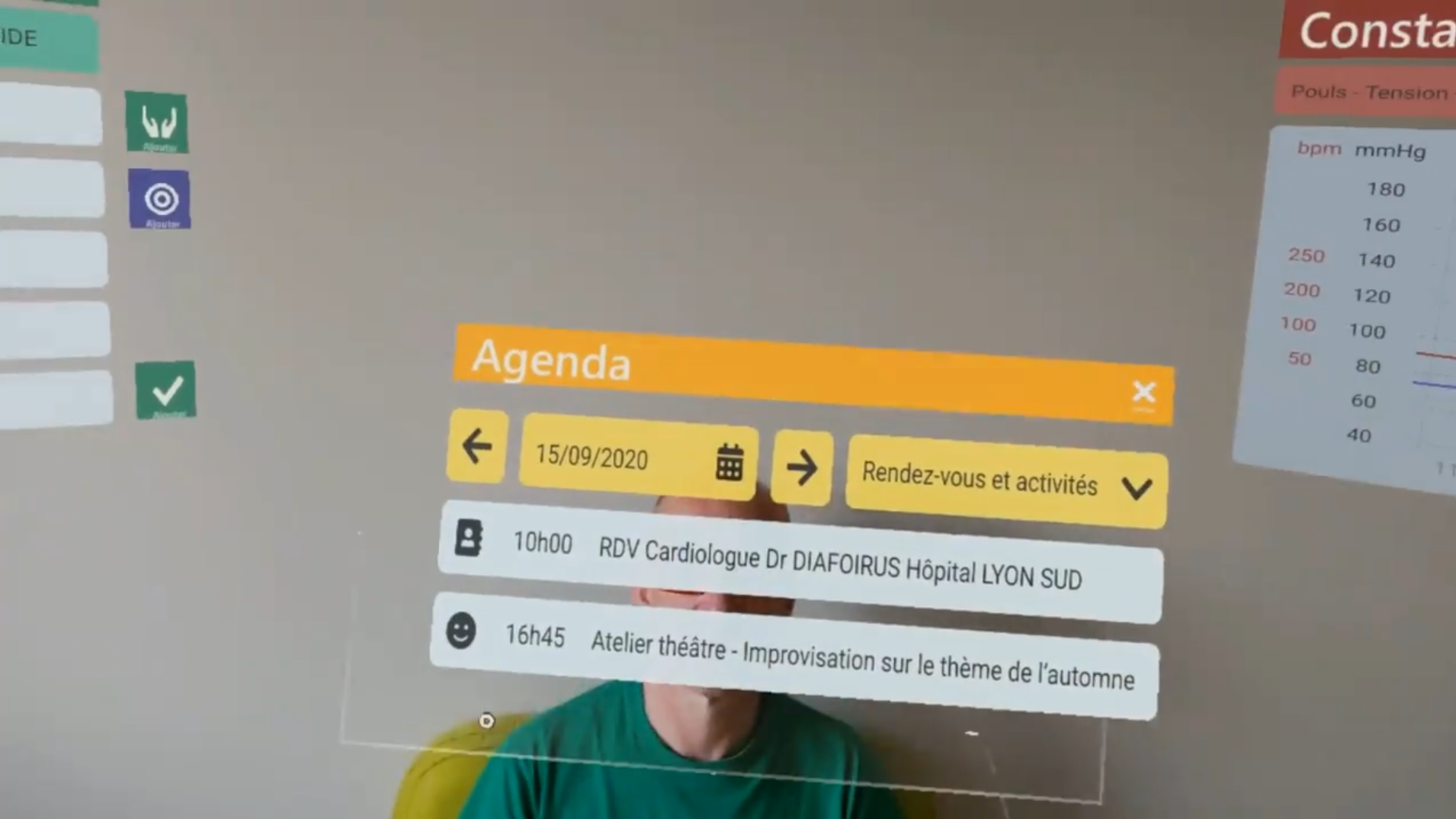
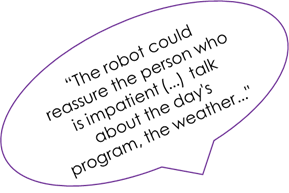
Face à ce problème récurrent évoqué lors des entretiens, plusieurs participants ont avancé l'idée d'une robot informatique qui permettrait aux gens de se repérer dans le temps et l'espace.
Le robot répondrait aux demandes récurrentes des personnes en leur indiquant, par exemple, l'heure de la journée ou l'activité à venir. On peut penser que ces sollicitations des personnes fragiles sont un moyen de se rassurer par une présence humaine, il sera donc très intéressant d'analyser les observations avec une réponse robotique.

Figure 6 Exemples de scénarios écrits par les participants
Situation sanitaire
La fatigue morale du personnel est accentuée par les conditions actuelles liées au contexte sanitaire que nous connaissons. Chez les personnes âgées aussi, nous ressentons une lassitude puisque les observations montrent que peu d'entre elles sont motivées pour participer aux animations collectives.
Pour y remédier, les participants interrogés s'accordent à dire que le soutien d'un robot social pourrait être une aide pour répéter les mesures de protection ou être un vecteur de motivation pour participer à des activités de groupe. Cela permettrait de réduire les nombreuses sollicitations qui sont moralement fatigantes.
Figure 7 Exemple d'une carte postale écrite par un participant
Communication/Attention
On nous a également montré que la crise avait été un levier pour l'entrée du numérique dans la vie de certains résidents âgés. En effet, avec l'aide de l'animateur, ils ont pu rester en contact avec leur famille. Le robot pouvait alors également venir en soutien pour maintenir ce lien, notamment à l'aide d'appels en visioconférence.
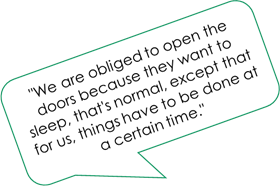
Le quotidien et le confort du résident sont très importants pour ces professionnels interrogés, soucieux du bien-être de chacun. Dès le début de la journée, le résident est au cœur des réflexions de ces professionnels du soin. Une aide-soignante nous a fait part de son malaise à réveiller les résidents.
Cette même participante, au cours de sa réflexion, a exprimé le souhait d'un robot qui viendrait réveiller/stimuler doucement le résident avec de la musique ou des mots doux par exemple, avant leur intervention dans la chambre pour éviter de devoir réveiller la personne elle-même.
La stimulation verbale semble être une idée pour stimuler les personnes âgées, mais aussi parfois pour les canaliser.
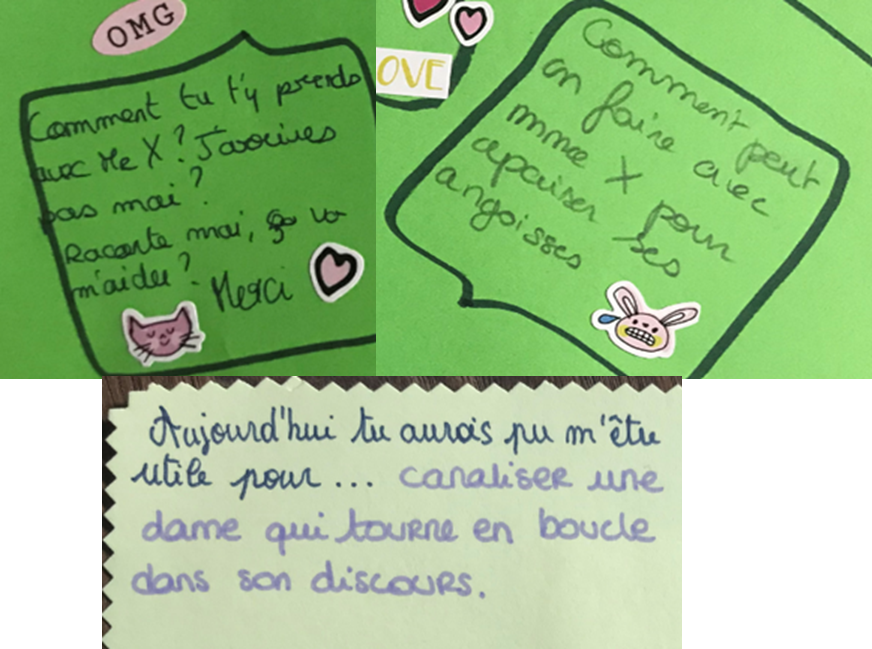
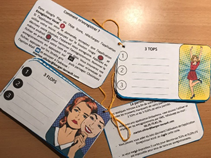
Figure 8 Exemples de productions recueillies dans les sondes culturelles
Guidage
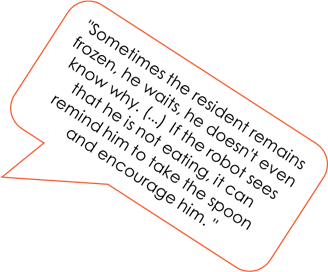
Pour ces personnes, qui ont parfois des difficultés cognitives, se repérer devient difficile. Souvent, la personne se déplace, mais lorsqu'elle se retrouve dans un couloir, elle ne sait pas quoi faire. Dans ces moments-là, les idées convergent vers un robot qui guiderait la personne vers son siège.
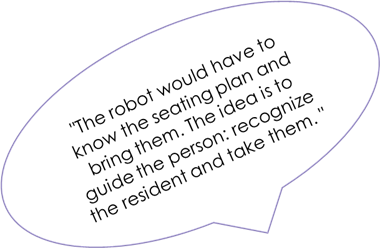

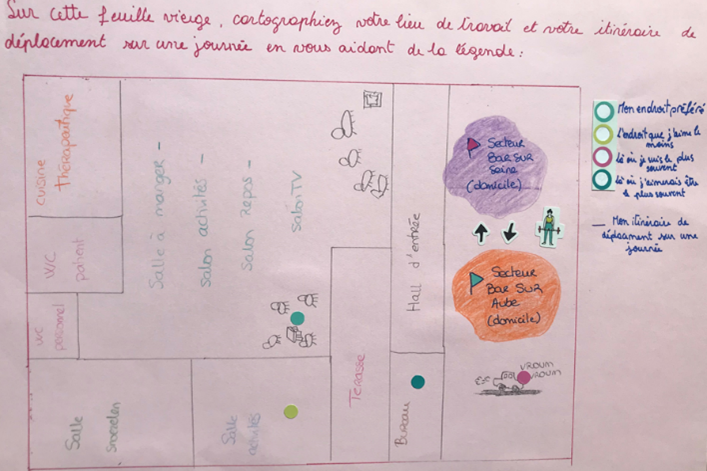
Figure 9 Exemple de carte réalisée par un participant
Activités
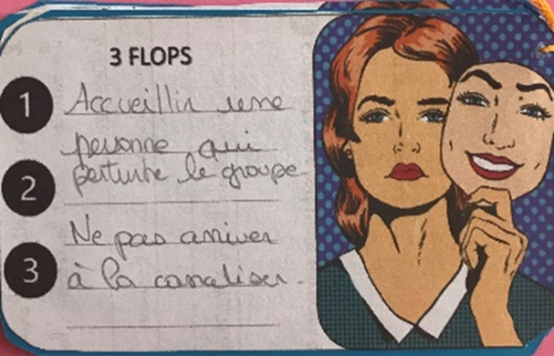
Figure 10 Exemple de "Flops".
Il n'est pas rare d'observer des profils très différents lors des séances d'animation de groupe à la maison de retraite ou pour des groupes de personnes au centre de soins de jour. Cette hétérogénéité peut avoir un impact sur l'ensemble du groupe.
Pour gérer ces comportements difficiles, de nombreux soignants pensent que des activités cognitives ou individuelles pourraient aider à canaliser la personne pour la rendre plus disponible pour le groupe ou vice versa.
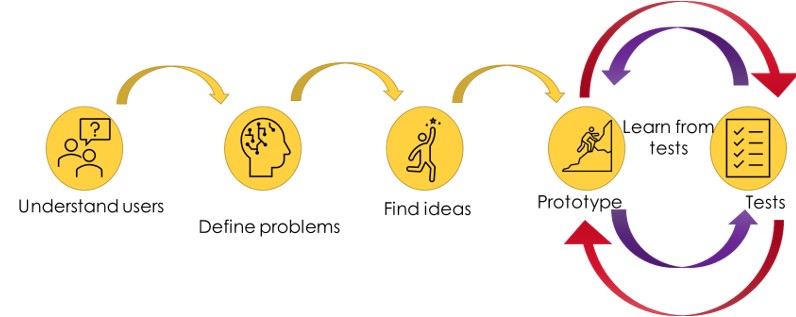
Perspectives
L'étude ethnographique est toujours en cours dans différentes institutions. Sur la base des données collectées jusqu'à présent, la prochaine étape consistera à co-concevoir des scénarios d'utilisation des robots avec les utilisateurs. Concrètement, les scénarios serviront de présentation et de support à des discussions de groupe, dans un processus itératif d'ajustement.
Ces sessions de co-conception se dérouleront au cours d'ateliers participatifs dédiés, organisés au sein de l'ActivAgeing Living Lab de l'UTT, en prenant soin de constituer des groupes représentatifs avec des acteurs de différentes institutions : professionnels de santé, soignants, personnes âgées de différentes maisons de retraite.
Une fois que nous avons fait des choix pour la conception et l'utilisation acceptables de l'interaction homme-robot, nous pouvons tester le robot de manière expérimentale et itérative, lors d'essais sur le terrain. Cela nous permettra d'observer les comportements et les interactions autour de cette machine. Nous allons imaginer plusieurs formes d'interactions à observer lors de l'introduction du robot.
Nous allons imaginer plusieurs formes d'interactions à observer lors de l'introduction du robot.
- Les gens parlent entre eux, du robot qui représente alors un participant non ratifié dans l'interaction (selon Goffman [40]).
- Une personne s'adresse au robot et vice versa, l'interaction se fait entre des participants ratifiés.
- L'interaction et les tours de parole se déroulent entre le robot, un soignant et une personne âgée par exemple (l'un des participants qui n'est pas adressé mais qui entend la conversation est représenté comme un participant non ratifié selon Goffman également).
En parallèle, le travail sur la conception de l'interaction homme-robot se concentrera plus techniquement sur la reconnaissance vocale et la navigation, afin d'obtenir un robot convivial.
Conclusion

Références
[1] Blanpain N., "De 2,8 millions de seniors en 1870 en France à 21,9 millions en 2070 ?", en France, portrait social, coll. "Insee Références", édition 2018.
[2] Papon, S., & Beaumel, C. (2020). Bilan démographique 2019. La fécondité se stabilise en France.
[3] Nations unies, (2019), Perspectives des populations mondiales. https://population.un.org/wpp/Graphs/DemographicProfiles/Pyramid/250
[4] Tournadre, N. (2002). La population de la France métropolitaine en 2050 : un vieillissement inéluctable. Economie et statistique, 355(1), 57-71.
[5] Tronto, J., & Maury, H. (2009). Un monde vulnérable. Pour une politique du " care ". Lectures, Les rééditions.
[6] Muller, F., Denis, B., Valentin, C., & Teillet, L. (2004). Vieillissement humain : évolution démographique et implications médicales. Nutrition clinique et métabolisme, 18(4), 171-174.
[7] Chassang, M. & Gautier, A. (2019). Les maladies chroniques, avis du CESE [document PDF], JO de la république française. doi : https://www.lecese.fr/sites/default/files/pdf/Avis/2019/2019_14_maladies_chroniques.pdf
[8] Éloi, M. & Martin, P. (2017). La personne au centre de la prise en charge en EHPAD : entre règles, pratiques et représentations. Revue française des affaires sociales, 21-40. doi:10.3917/rfas.171.0021.
[9] Kuhnel, M. L., El Iraki, I., Tranchant, M., & Aspe, G. (2010). Prévalence de la dépression en EHPAD : nécessité d'une approche gérontopsychiatrique. NPG Neurologie-Psychiatrie-Gériatrie, 10(57), 111-115.
[10] Thomas, P., Barruche, G., & Hazif-Thomas, C. (2012). La souffrance des soignants et fatigue de compassion.. La revue francophone de gériatrie et de gérontologie, 19(187), 266-273.
[11] Bailleul, M., & Marie-Bailleul, G. (2020). Éthique de la sollicitude dans une unité cognitivo-comportementale : des "proofs of care" aux "outils pour le care". NPG Neurologie-Psychiatrie-Gériatrie.
[12] Guérin S. Pour une éthique concrète de la sollicitude ; 2016 [https://www.espace-ethique.org/ressources/article/pour-une-ethique-concrete-de-la-sollicitude. Consulté le3 septembre 2020].
[13] Paperman, P. (2010). Éthique du care : un changement de regard sur la vulnérabilité. Gérontologie et société, 2(2), 51-61. https://doi.org/10.3917/gs.133.0051
[14] Blomberg, J., & Karasti, H. (2012). Positionner l'ethnographie au sein de la conception participative. Manuel international de conception participative de Routledge, 86-116.
[15] Crabtree, A. (1998, novembre). Ethnographie dans la conception participative. Dans Actes de la conférence sur la conception participative de 1998 (p. 93-105).
[16] Eyssel, F., & Hegel, F. (2012). (s) he's got the look : Les stéréotypes de genre des robots 1. Journal of Applied Social Psychology, 42(9), 2213-2230.
[17] Callaway, C., et Sima'an, K. (2006). Wired for speech : Comment la voix active et fait progresser la relation homme-ordinateur. Linguistique informatique, 32(3), 451-452.
[18] Spatola, N. (2019). L'interaction Homme-Robot, de l'anthropomorphisme à l'humanisation. LAnnée psychologique, 119(4), 515-563.
[19] Mori, M., MacDorman, K. F., & Kageki, N. (2012). The uncanny valley [from the field]. Magazine IEEE Robotics & Automation, 19(2), 98-100.
[20] Shneiderman, B. (1993). 7, 1 A nonanthropomorphic style guide : overcoming the Humpty Dumpty syndrome. Des étincelles d'innovation dans l'interaction homme-machine (1993), 331.
[21] Duffy, B. R. (2003). Anthropomorphism and the social robot. Robotique et systèmes autonomes, 42(3-4), 177-190.
[22] Goleman, D. (1995). Emotional Intelligence Bantam Books. New York.
[23] Moga, S. D. (2000).). Apprendre par imitation : une nouvelle voie d'apprentissage pour les robots autonomes (Thèse de doctorat, Cergy-Pontoise
[24] Ozaki, Y., Ishihara, T., Matsumura, N., Nunobiki, T. et Yamada, T. (2018, août). Prédiction de prise de décision pour l'engagement humain-robot entre un piéton et un robot réceptionniste. Dans 2018 27e symposium international de l'IEEE sur la communication interactive entre robots et humains (RO-MAN) (pp. 208-215). IEEE
[25] Ozaki, Y., Ishihara, T., Matsumura, N. et Nunobiki, T. (2019). L'apprentissage par renforcement centré sur l'utilisateur peut-il permettre à un robot d'attirer les passants sans provoquer d'inconfort.?. préimpression arXiv arXiv:1903.05881.
[26] Michalowski, M. P., Sabanovic, S., & Simmons, R. (2006, mars). Un modèle spatial d'engagement pour un robot social. Dans 9e atelier international de l'IEEE sur le contrôle avancé des mouvements, 2006. (pp. 762-767). IEEE.
[27] Goffman, E., & Kihm, A. (1973). La mise en scène de la vie quotidienne (Vol. 2). Paris : Minuit.
[28] Randall, D., Harper, R. et Rouncefield, M. (2007). Le travail de terrain pour la conception : théorie et pratique. Springer Science & Business Media.
[29] Schmidt, K. (2018). Pratique et technologie : sur les fondements conceptuels de l'informatique centrée sur la pratique. Dans Socio-informatique : Une perspective basée sur la pratique de la conception et de l'utilisation des artefacts informatiques (p. 47-103). Oxford University Press.
[30] Watzlawick, P., Beavin, J. H., Jackson, D. D., & Morche, J. (1972). Une logique de la communication
[31] Goffman, E. (1975). Stigmate. Les usages sociaux des handicaps. Paris, Éditions de Minuit.
[32] Gaver, William & Dunne, Anthony & Pacenti, Elena. (1999). Design : Cultural Probes. Interactions. 6. 21-29. 10.1145/291224.291235.
[33] Britten, Nicky. (1995). Qualitative Interviews in Medical Research. BMJ (Recherche clinique).). 311. 251-3. 10.1136/bmj.311.6999.251.
[34] Bastien, S. (2007). Observation participante ou participation observante ? Usages et justifications de la notion de participation observante en sciences sociales.. Recherches qualitatives, 27(1), 127-140.
[35] Hennion, A., & Vidal-Naquet, P. A. (2015). " Enfermer Maman ! " Épreuves et arrangements : le care comme éthique de situation. Sciences sociales et santé, 33(3), 65-90.
[36] Cooper, A., Reimann, R., Cronin, D., & Noessel, C. (2014). L'essentiel du design d'interaction. John Wiley & Sons.
[37] NielsenLene, Personas. Dans : SoegaardMads et Barrage, Rikke Friis (eds.). The Encyclopedia of Human-Computer Interaction, 2e édition. Aarhus, Danemark : The Interaction Design Foundation, 2013:
[38] Carroll, J. M. (Ed.). (1995). Conception basée sur des scénarios : envisager le travail et la technologie dans le développement de systèmes. John Wiley & Sons, Inc.
[39] Kitzinger, J. (1995). Qualitative research : introducing focus groups. Bmj, 311(7000), 299-302.
[40] Goffman, E. (1987). Façon de parler, traduit par A. Kihm, Paris : Éditions de Minuit, coll. "Le Sens commun".